
The State of Robotics – August 2021

Gabriel Aguiar Noury
on 15 September 2021
Tags: News , robotics , ROS , thestateofrobotics
Robotics is everywhere. Researchers and companies are all working on groundbreaking developments, either improving robotics to be state of the art or pursuing innovative applications. That is the main aim of this monthly blog; to show you what we are capable of doing today and to inspire you to think about the bigger picture. For the benefit of your current or future robotics project!
Open source robotics events – ROS Con to ROS World
Yes, unfortunately we will not be travelling to New Orleans. Luckily we are still going to have the option of sharing and networking in a virtual event that will be packed with great presentations and roundtables. So as the biggest ROS conference is going virtual we are putting together an agenda that you will love!
Get ready to learn more about our ROS open source tools to deploy and maintain robots in the field.
You still have time to register right here!
Jumping their way out
Atlas robots have finally all the skills they need to run away from Boston Dynamic labs. You have probably seen the videos already, so I won’t jump into much details. But did you spot our OS in their computers? We just wanted to take the opportunity to say that we are really grateful to the robotics community and we will keep working to improve your development experience with our OS!
If you want to learn more about how Boston Dynamics taught their robots to do parkour, I recommend this great article from Evan Ackerman.
Helping us explore the universe
It’s not the first time and it certainly won’t be the last that NASA explores the use of robots inside their space shuttle for long missions. Astrobee, NASA’s new free-flying robotic system, will help astronauts reduce the time they spend on routine duties, leaving them to focus more on the things that only humans can do.
Working autonomously or via remote control by astronauts, flight controllers or researchers on the ground, the robots are designed to complete tasks such as taking inventory, documenting experiments conducted by astronauts with their built-in cameras or working together to move cargo throughout the station.
Check out this latest test of Astrobee, as it navigates the station to find the location designated as a “vent” used for cabin air circulation. The system uses computer vision to automatically detect the foreign object blocking the vent, represented by a printed image of a sock.
And it’s using ROS Kinetic! (Which is great, but remember that is EOL so rather update or get ROS ESM to keep getting security maintenance)
Robotics implants save lives.
One of the biggest challenges for people with type 1 diabetes, especially those who must inject insulin into their bodies multiple times a day, is the medicine delivery system. Insulin pumps are available commercially, but they require external hardware that delivers the drug through a tube or needle that penetrates the body. Implantable insulin pumps are also available, but those devices have to be refilled by a tube that protrudes from the body, inviting bacterial infections. That’s why such systems have not proven to be popular.
Researchers at the BioRobotics Institute in Italy published a project that could solve these issues. A robot that replaces or restores physiological processes, and functions entirely inside the gut. The PILLSID (PILl-refiLled implanted System for Intraperitoneal Delivery), is a fully implantable robotic device refillable through ingestible magnetic pills carrying drugs (incredible right? check the diagram). Once refilled, the device acts as a programmable microinfusion system for precise intraperitoneal delivery. The device weighs 165 grams and is 78 millimetres by 63 millimetres by 35 millimetres.
The robotic device is grounded on a combination of magnetic switchable components, miniaturized mechatronic elements, a wireless powering system, and a control unit to implement the refilling and control the infusion processes.
Here’s how the refill procedure works in humans:
- You swallow the capsule just like a pill, and it moves through the digestive system until it reaches the implant.
- Using magnetic fields, the implant draws the capsule toward it, rotates it, and docks it in the correct position.
- The implant then punches the capsule with a retractable needle and pumps the insulin into its reservoir.
- After the insulin is delivered, the implant releases the capsule, allowing it to continue naturally through the digestive tract to be excreted from the body.
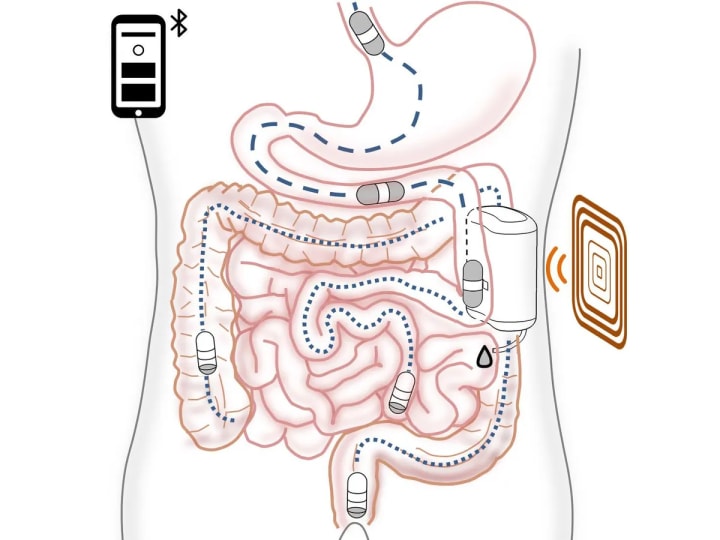
The magnetic fields that control docking and release of the capsule are controlled wirelessly by an external programming device and can be turned on or off. The implant’s battery is wirelessly charged by an external device.
If you want to learn more about this study, please read their amazing paper.
Products accelerating autonomous mobile robots adoption
Robotics will change everything, and there isn’t an industry that will not benefit from the advancement of robotics. However, robotics is not only about automation, it is also about safety. Emesent is a good example of this.
Emesent is a company working on drone autonomy, LiDAR mapping, and data analytics. Their flagship product, Hovermap, is a smart mobile scanning unit that combines collision avoidance and autonomous flight technologies to map hazardous and GPS-denied environments.
Hovermap can be mounted to a drone to provide autonomous mapping in challenging, inaccessible areas. As part of the start-up sequence, the scanner sends out 300,000 laser points per second to get an idea of the environment. It means if the drone loses contact with the driver, it goes back to a waypoint to find its way home.
Hovermap weighs only 1.8kg (4 lb), it is easily portable and compatible with smaller drones such as the DJI M210.
Autonomous mobile robots, Unity and ROS
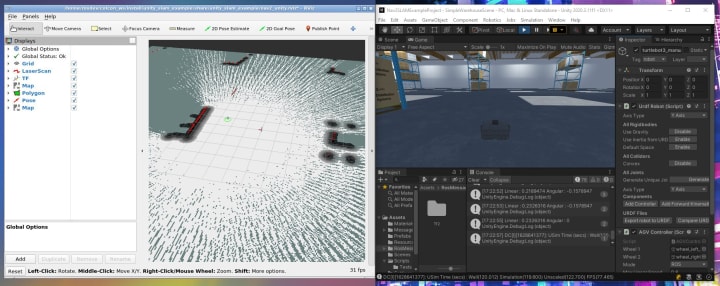
The leading platform for creating and operating real-time 3D content, Unity, announced support for ROS 2. To showcase this, they launched a demo of a warehouse environment and a Turtlebot 3 mobile robot with simulated LIDAR and motor controllers. Robotics-Nav2-SLAM demonstrates how to get started with simulating simultaneous localization and mapping (SLAM) and navigation for autonomous mobile robots with Unity and ROS 2.
Unity aims to give developers access to the interfaces built to make communicating with ROS or ROS 2 easy. This will allow you to import existing robot configurations directly from URDF files with a URDF Importer, and start exercising your robot against Unity’s rendering pipeline and physics simulation.
Intel RealSense camera – alternatives for open source robotics
In mid-August, Intel told CRN that it is ‘winding down’ the company’s portfolio of high-tech cameras and sensors that were built for computer vision applications like robotics and digital signage to focus on its core business. And the community was shocked by this. Intel’s RealSense camera is a great piece for stereo depth sensing. Intel has the resources to make sensors with excellent performance and sell them relatively cost-effectively, and they’ve done exactly that. For applications in direct sunlight or multiple camera sensing in a single computer, it was the best option.
A later report by IEEE Spectrum, put things in a better light. They report that Intel will continue to provide RealSense stereo cameras to people who want them for now, although long term, things don’t look good.
For the moment, they are going to keep supporting series D410, 415, 430, 450, modules
D415, 435, 435i integrated product lines and the Open Source SDK. But those reaching their end of life are LiDAR (L515), Facial Authentication (F450) and Tracking (T265) product lines this month. D455 will be EOL’ed but not the module. For more information please read the official announcement here.
Looking for alternatives? Well, this is the best place to start. The community has been talking about the Orbecc depth cameras, Luxonis OAK-D, Structure Core by Occipital, among others. Ultimately, while your price range and technical requirements will be your main criteria, having the feedback of the community is the best decision tool.

Open source robotics – tutorial
Looking to start learning about micro-ROS? Sony announced that the SPRESENSE 10 22 works with micro-ROS, and the Renesas RA6M5 MCU, now officially supports micro-ROS. So if you want to learn how to use an ESP32, NuttX, and microROS together, this is the best place to start.
And if you haven’t seen our blog about getting started with micro-ROS on the Raspberry Pi Pico, we recommend you to check that out as well.
Stay tuned for more robotics news
August was a month with good news, amazing use cases, and another step forward in our constant improvement of robotics and autonomous systems.
As always, we would love to learn from you. So send us a summary of your robotics innovation and project to robotics.community@canonical.com and we will share it in our next robotics newsletter. Thanks for reading!
Talk to us today
Interested in running Ubuntu in your organisation?
Newsletter signup
Are you building a robot on top of Ubuntu and looking for a partner? Talk to us!

Related posts
The State of Robotics – August 2022
Another fascinating month for robotics. Researchers are the highlight of the month. Through their work, we are pushing the boundaries of self-awareness,...
Deploying scalable AI and real-time robots at ROSCon 24
Another year, another ROSCon! This year we’re setting off to Odense, Denmark. At Canonical, we are excited to once again sponsor this event for a community...
TurtleBot3 OpenCR firmware update from a snap
The TurtleBot3 robot is a standard platform robot in the ROS community, and it’s a reference that Canonical knows well, since we’ve used it in our tutorials....